
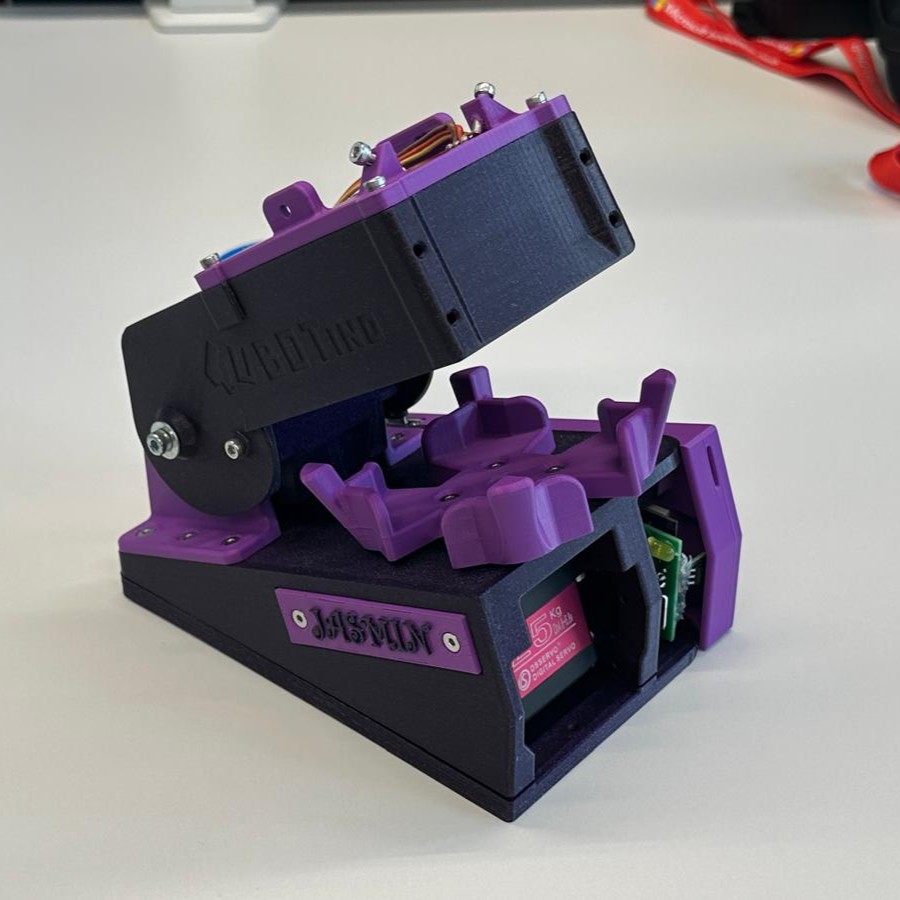
The name CUbe+roBOT+ino
Jasmin's CUBOTino Project
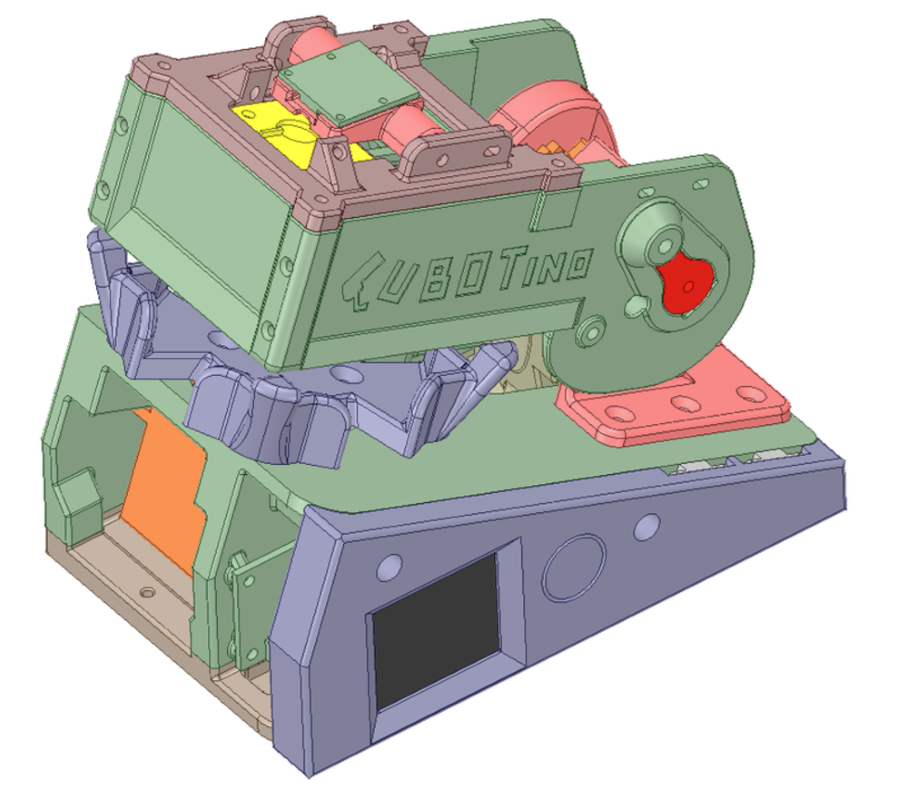
The CUBOTino Robot
CUBOTino Autonomous is a small, fully 3D printed robot that solves the Rubik's Cube using a Raspberry Pi Zero 2 and a PiCamera. The robot takes about 90 seconds to solve the cube.
The PiCamera captures the state of the cube, while the Raspberry Pi Zero 2 analyzes the images and calculates a near-optimal solution using the Kociemba algorithm. CUBOTino Autonomous is an impressive example of how modern technology and 3D printing can be combined to solve complex tasks in a simple and accessible way.
The name CUbe+roBOT+ino
The name of the robot is CUBOTino. Besides the obvious combination of CUbe+roBOT, «ino» is the Italian suffix for small... a reference to Andrea Favero's origins and the robot's very small dimensions.
The project
The project steps can be broken down into
- purchasing components
- ordering the CUBERTino connection board
- installing the Raspberry Pi Zero 2
- testing and adjusting the servos
- print 3D parts
- assemble 3D parts
- fine-tune and operate the robot
Let’s now proceed and build the CUBOTino robot.
Step 1 - Buying components
Jasmin's CUBOTino project requires various components to build the robot. These include ...
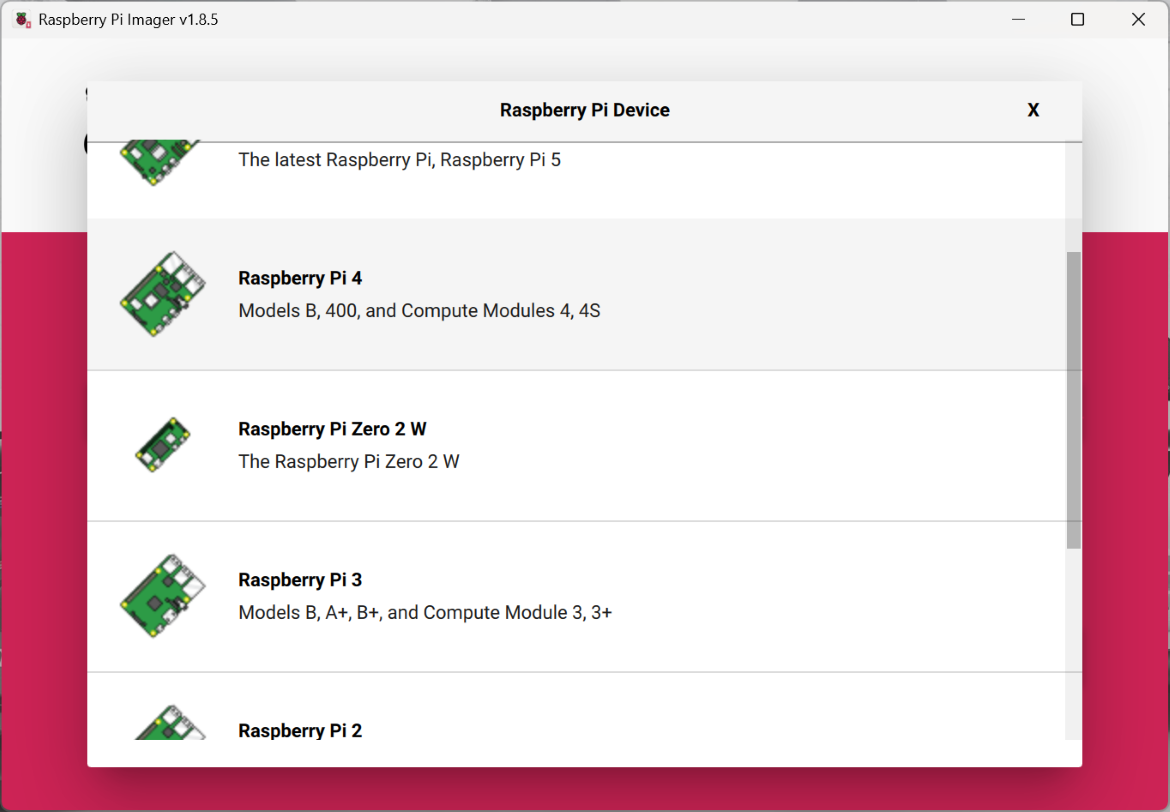
- Raspberry Pi Zero2WH.
- A 16GB Class10 microSD card serves as memory.
- The PiCamera (V1.3) with a suitable flex cable connects the camera to the Raspberry Pi Zero.
- Two servos (TD-8325MG, 180 degrees, 25 kg metal) with metal arm «25T» ensure mobility.
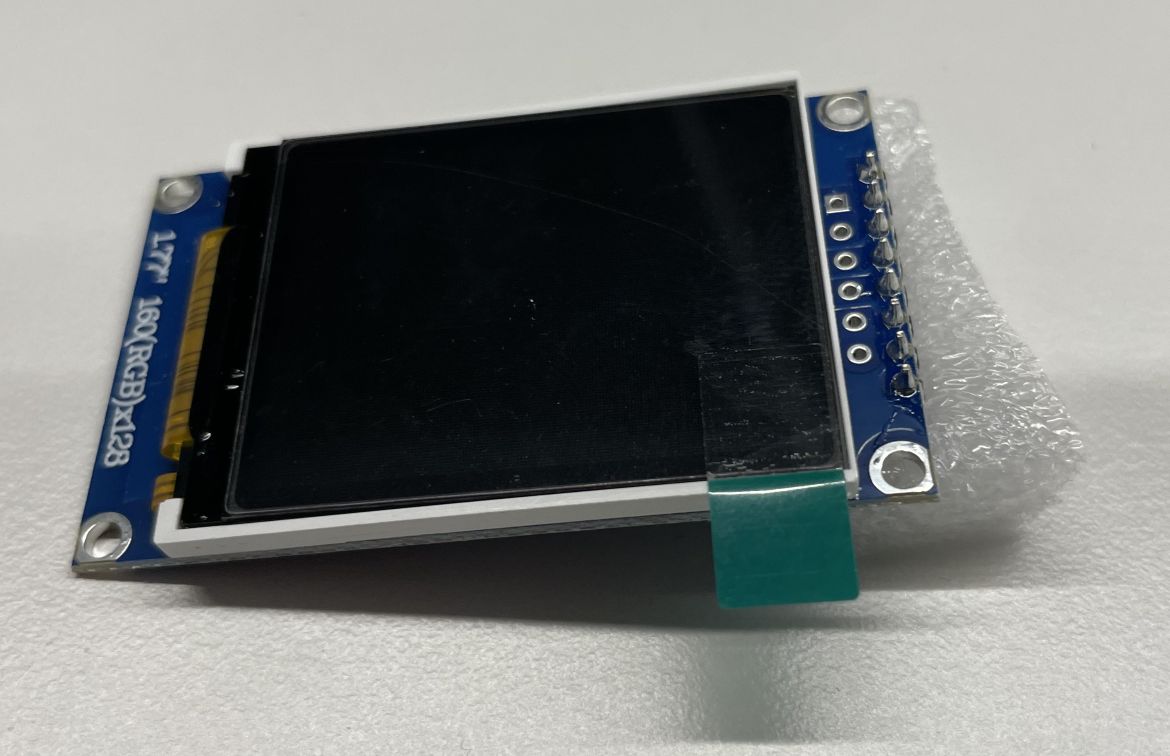
- A 1.77” TFT display (SPI) shows information.
- Approx. 500 grams of filament are required for 3D printing.
- A 3W LED with integrated driver provides the lighting.
- A capacitive touch sensor enables control, while a step-down voltage regulator ensures the power supply.
- Finally, micro-USB or USB-C breakout boards are required for the connections.


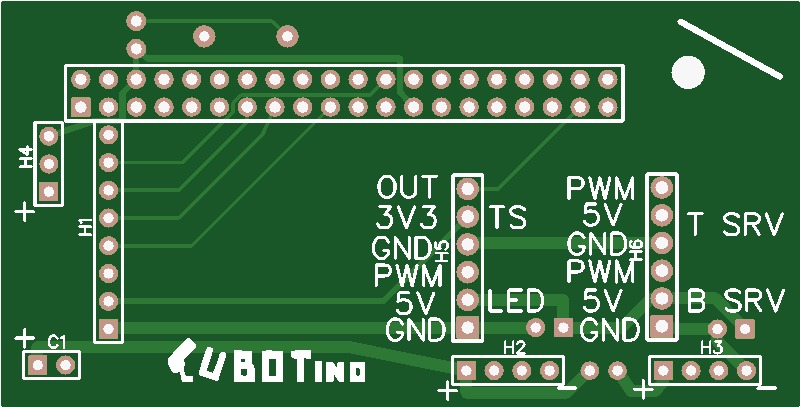
Step 2 - Order the CUBOTino connection board
For the Raspberry Pi connection board, Chad (Vanblokland) has created and provided the Gerber files to order the board from a board manufacturer.
Only the few components required then need to be soldered onto the board received. This makes assembly much easier and ensures that all connections are correct and reliable.
The carefully designed Gerber files ensure that the board is optimally matched to the Raspberry Pi and supports all the necessary connections and functions.
Order PCB board via JLCPCB
- Open GitHub Repository GitHub CUBOtino Gerber and download the Gerber Files
- Zip all Files from the \gerber folder into one Zip File «cubertino.zip».
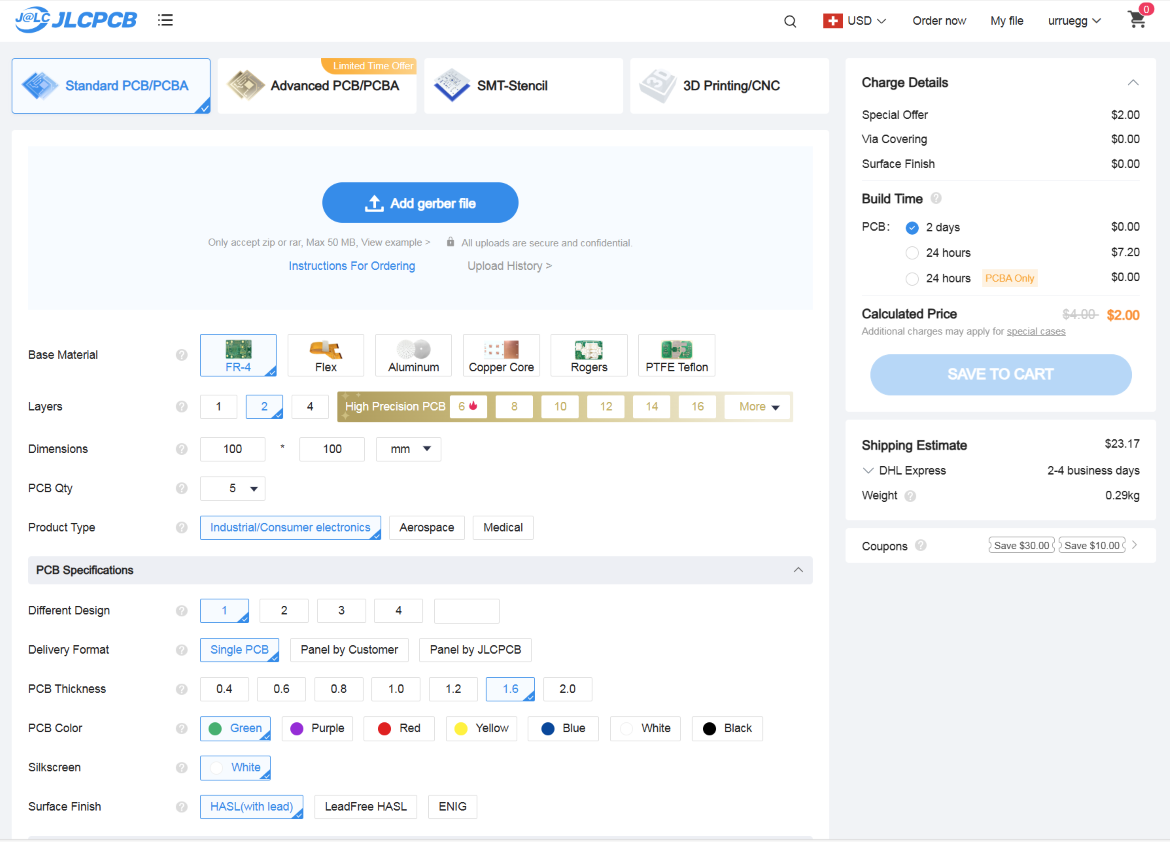
- Open JLCPCB, Login and select order now to create a new order
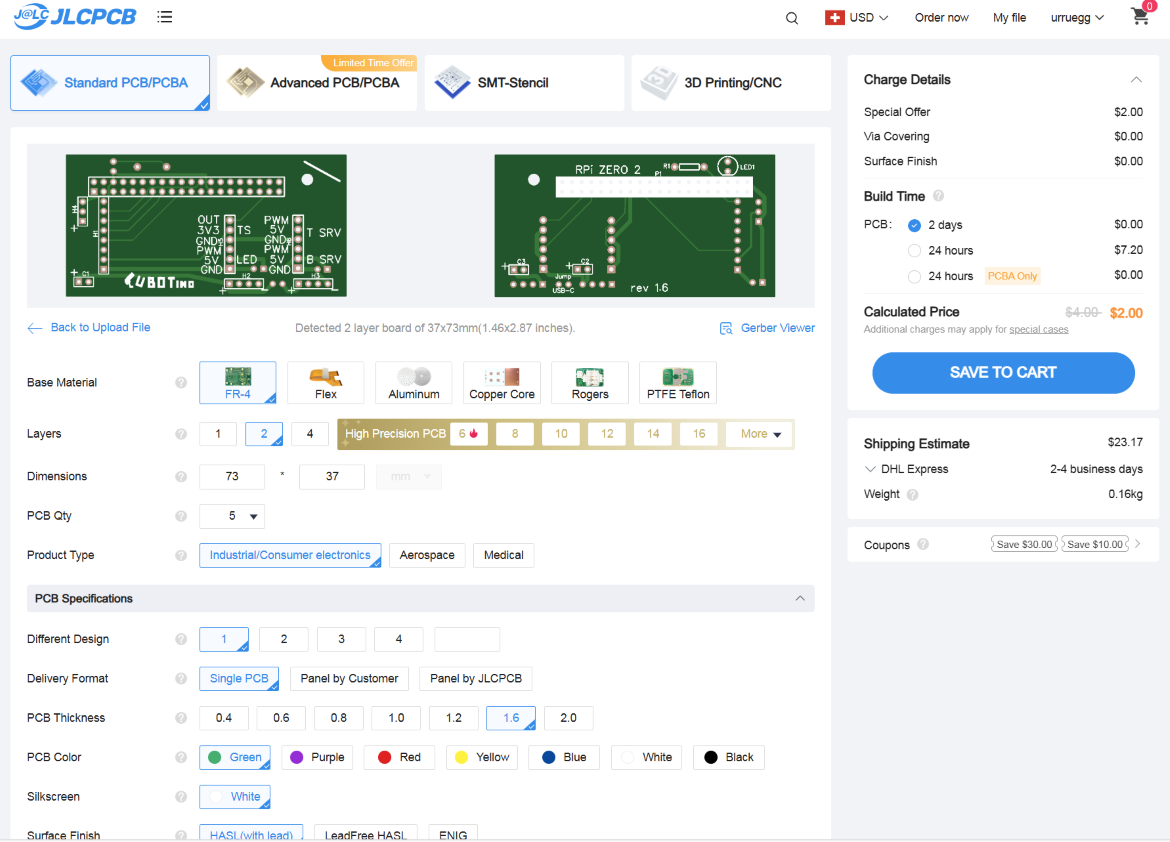
- Add gerber files (Zip File)
- Save to cart and within 2-4 business days you receive the board
Step 3 - Raspberry Pi Zero 2 Installation
We use the simplified installation using the GitHub repository. This method is not only easier and faster, but also makes it easier to update the robot when newer updates are available on GitHub.
Recommended Operating System
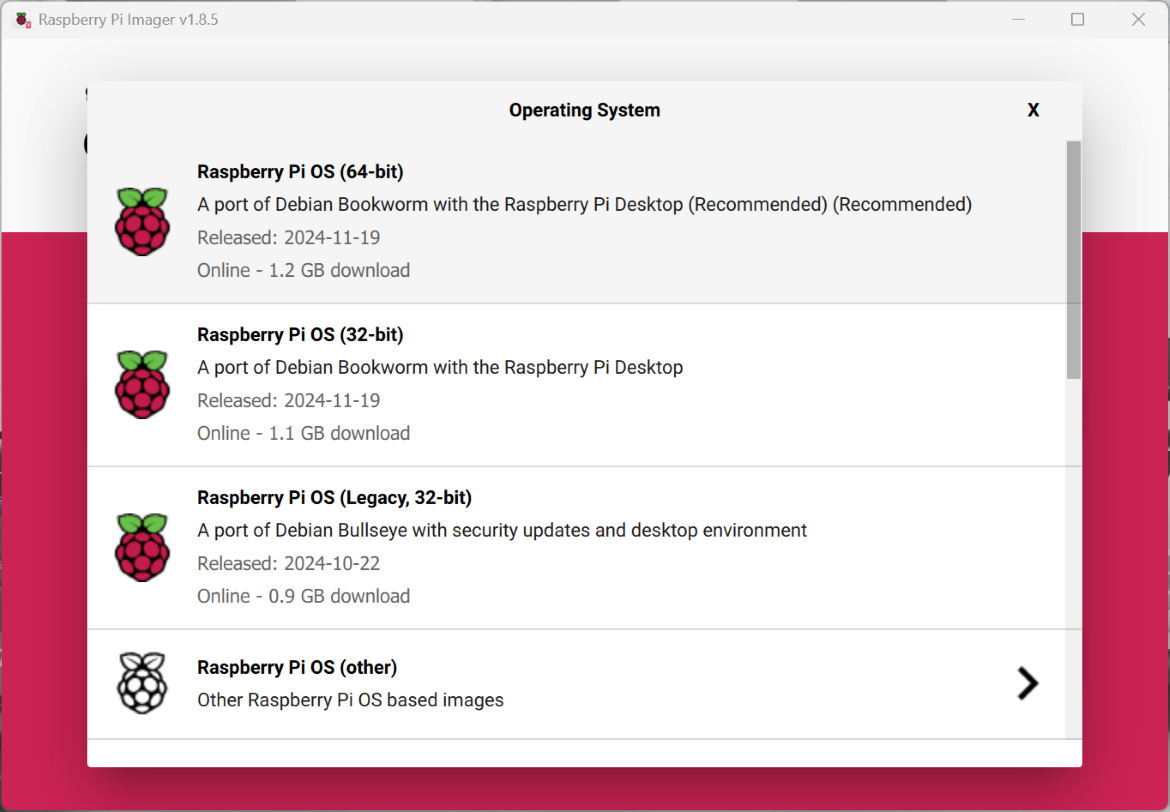
For CUBOTino the recommend operating system is OS 11 (Bullseye).
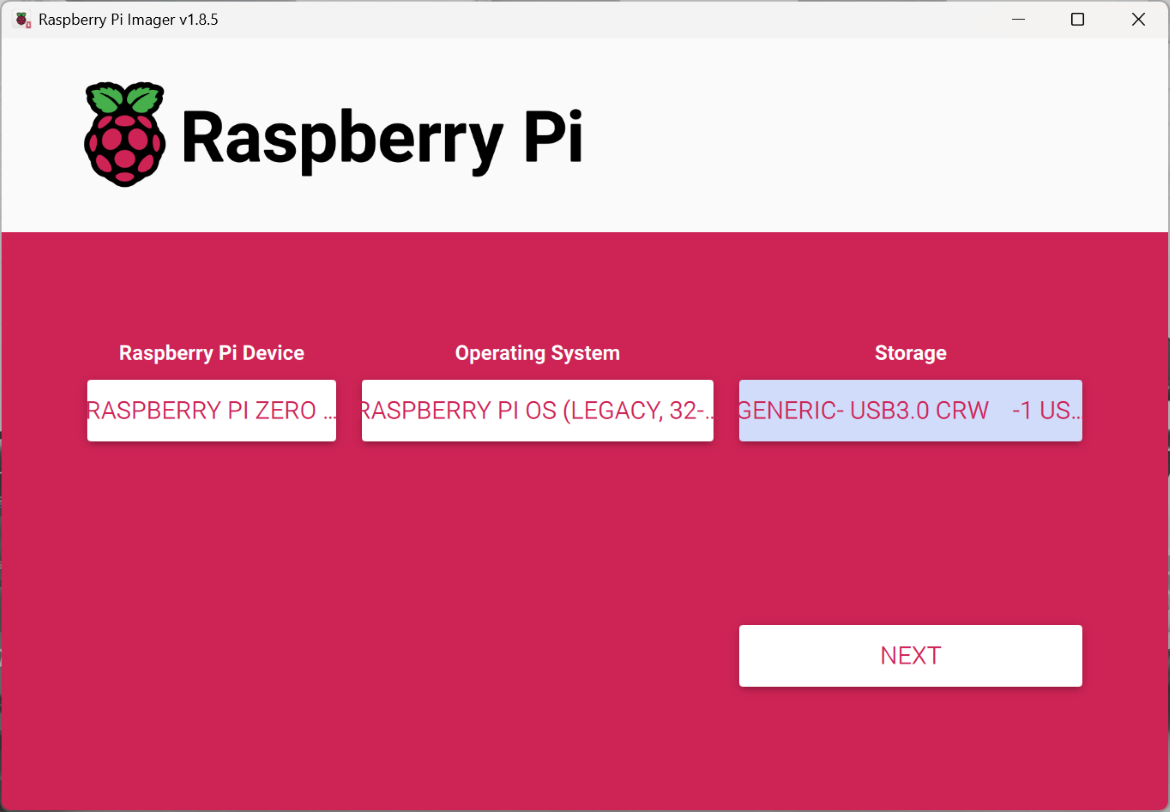
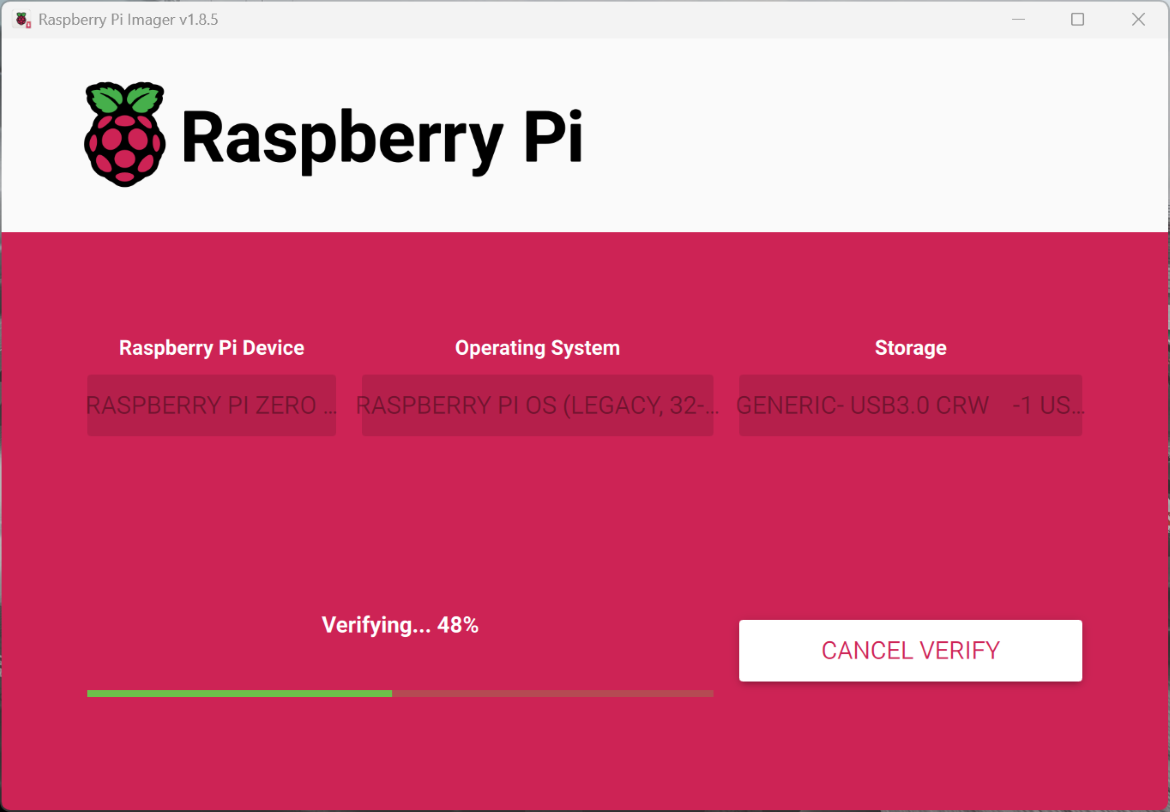
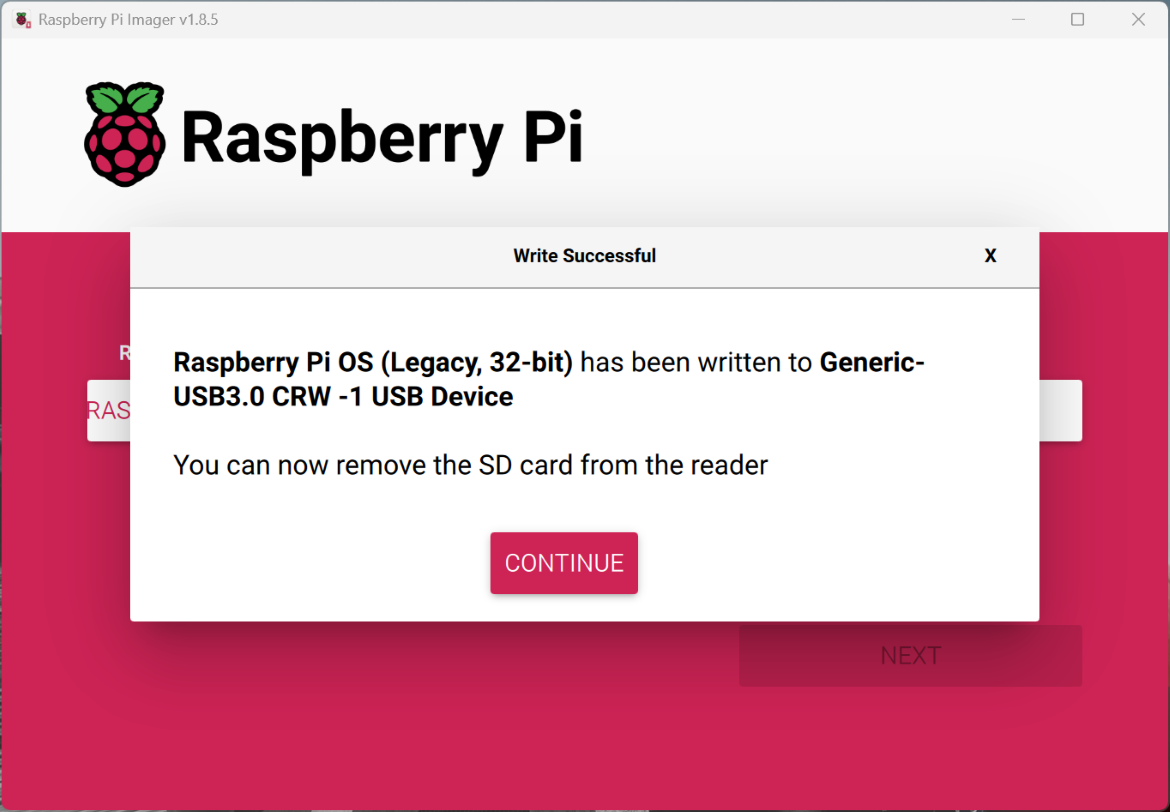
- Step: Download Raspberry Pi Imager
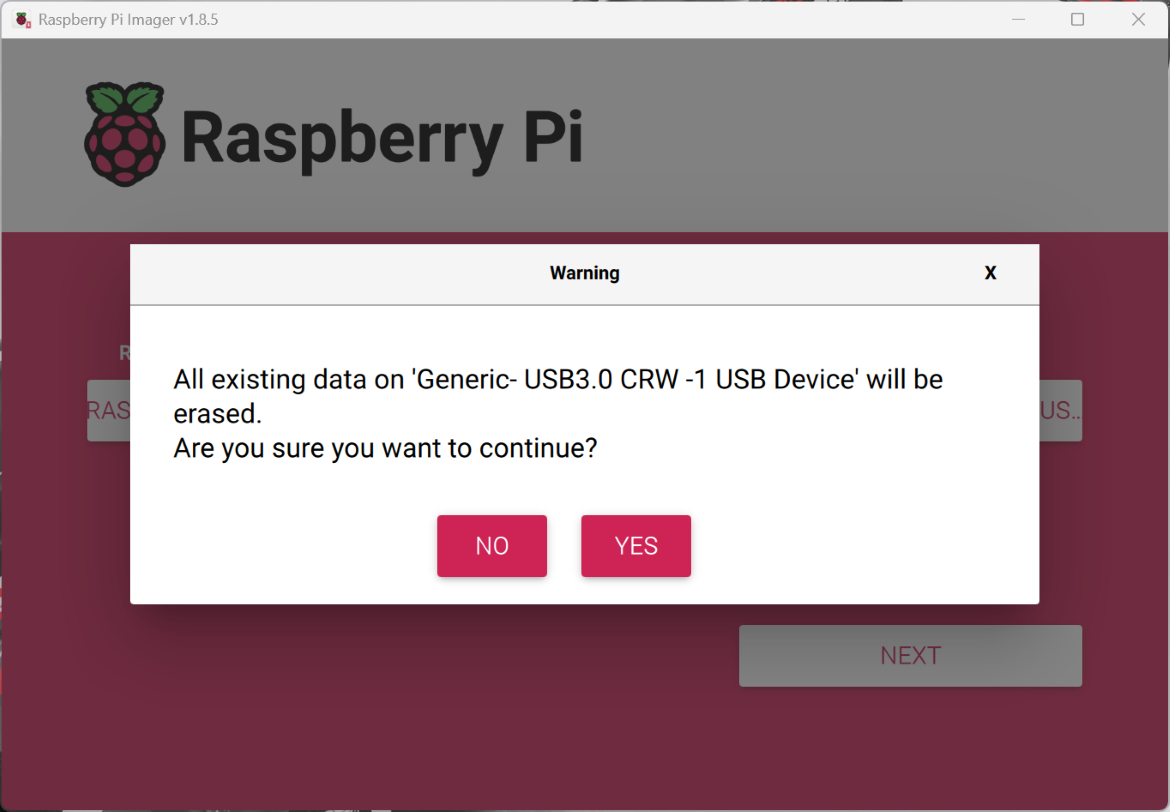
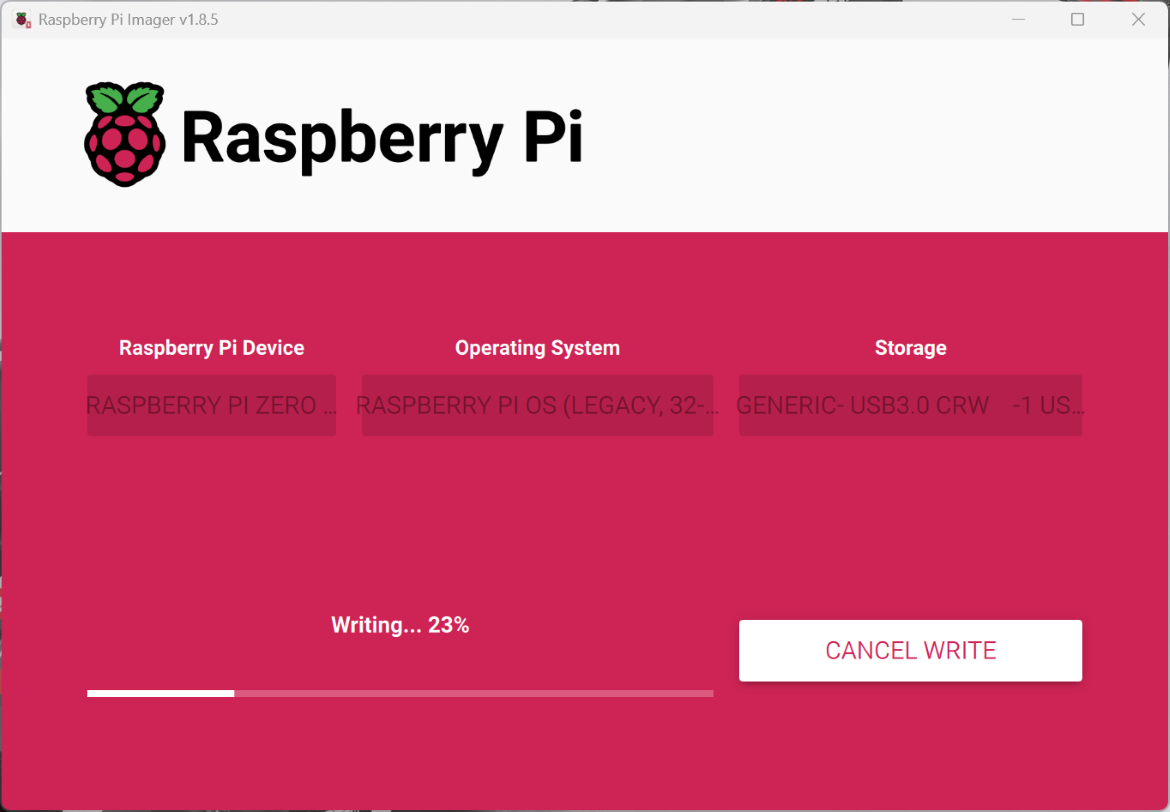
- Step: Flash the OS to the microSD card:
- Select the type of card we are using: Raspberry Pi OS (Legacy, 32-bit) Full.
- Make sure that "A port of Debian Bullseye" and "Desktop environment" are mentioned.
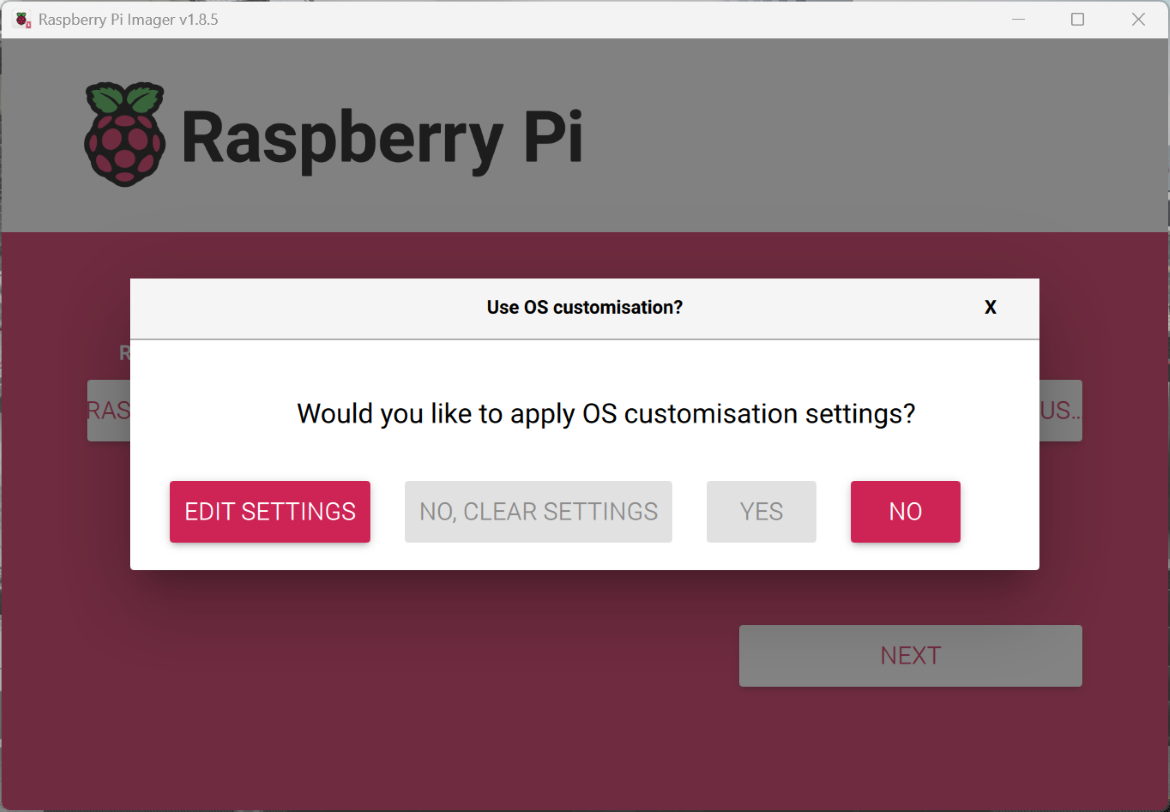
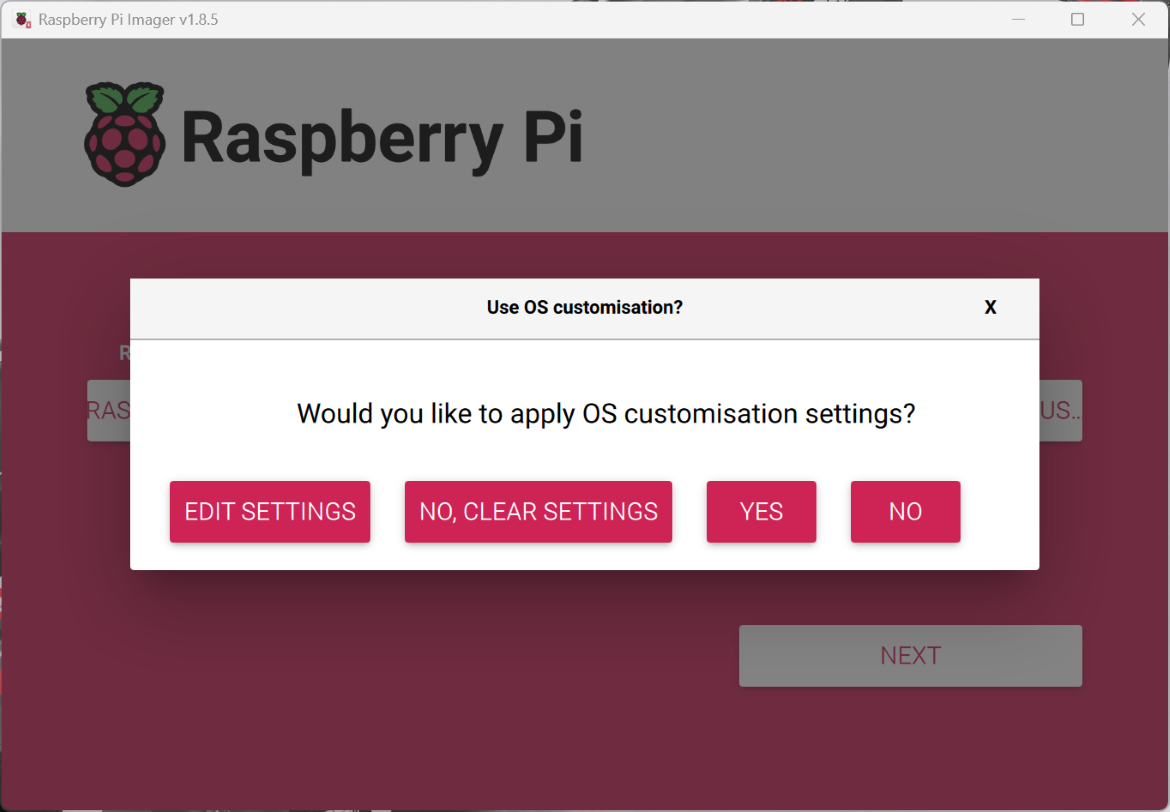
- Step: Edit the settings:
- General:
- Host name: cubotino.local
- Username: pi
- Password: Choose a password (e.g. raspberry, although a more secure password is recommended)
- SSID: Enter the network SSID.
- Network Password: Enter the network password.
- Country Code: Enter the country code.
- Local Settings: Adjust the local settings.
- Services and Options:
- Leave the defaults as they are.
- Make sure "Enable SSH" is selected.
- General:
Step 5 - Print 3D Parts
We need to 3D print several parts for the CUBOTino project.
Accessing the 3D Parts
All the necessary 3D parts for the CUBOTino project are available in the [GitHub Repository](https://github.com/AndreaFavero71/cubotino/tree/main/stl). You can download the STL files from there.
List of Parts
- Structure
- Top cover
- Hinge
- Baseplate
- Cube holder
- Cube lifter
- Servo axis support
- PCB cover display
- PiCamera holder frame
- Personaliz plate
In total it requires ca. 175m / 692g filament and 52h printing time. There are two options
- Do it your self using your own 3D Printer, as we did it.
- Order via Online 3D Printing Instant Quote - JLC3DP


Step 7 - Assembling the 3D parts
Now it's time to assemble all parts together.




References
- The Official Rubik's Cube
- Zauberwürfel: "Schrei Hurra! Schmeiss 'ne Runde!" - (DER SPIEGEL)
- Ernő Rubik (Wikipedia)
- CUBOTino Autonomous Rubik's Cube Robot (Raspberry Pi Zero 2, PiCamera) - (Instructables)
- Buy a Raspberry Pi Zero 2 W (Raspberry Pi)
- Raspberry Pi OS – Raspberry Pi Imager (Download)
- GitHub Repository Gerber Files (Download)
- PCB Prototype & PCB Fabrication Manufacturer
Contact us
Lorem ipsum dolor sit amet, consectetur adipiscing elit.